Back to main
Physics Simulation
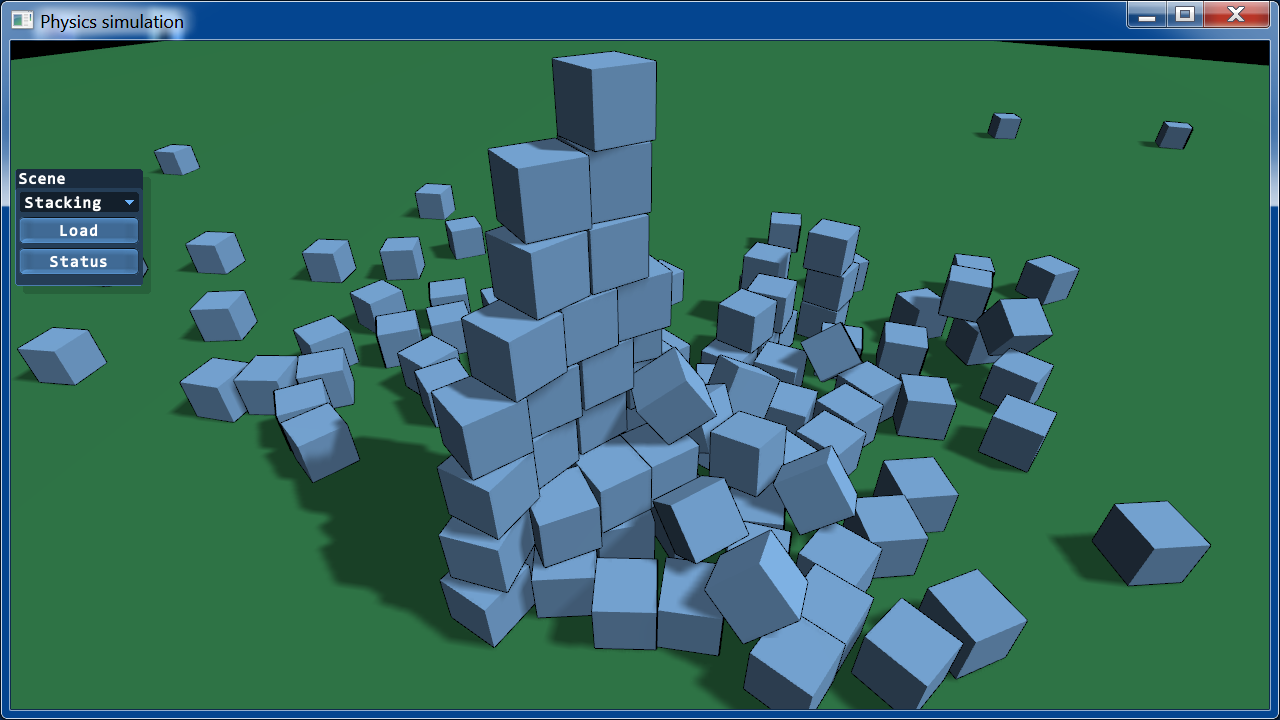
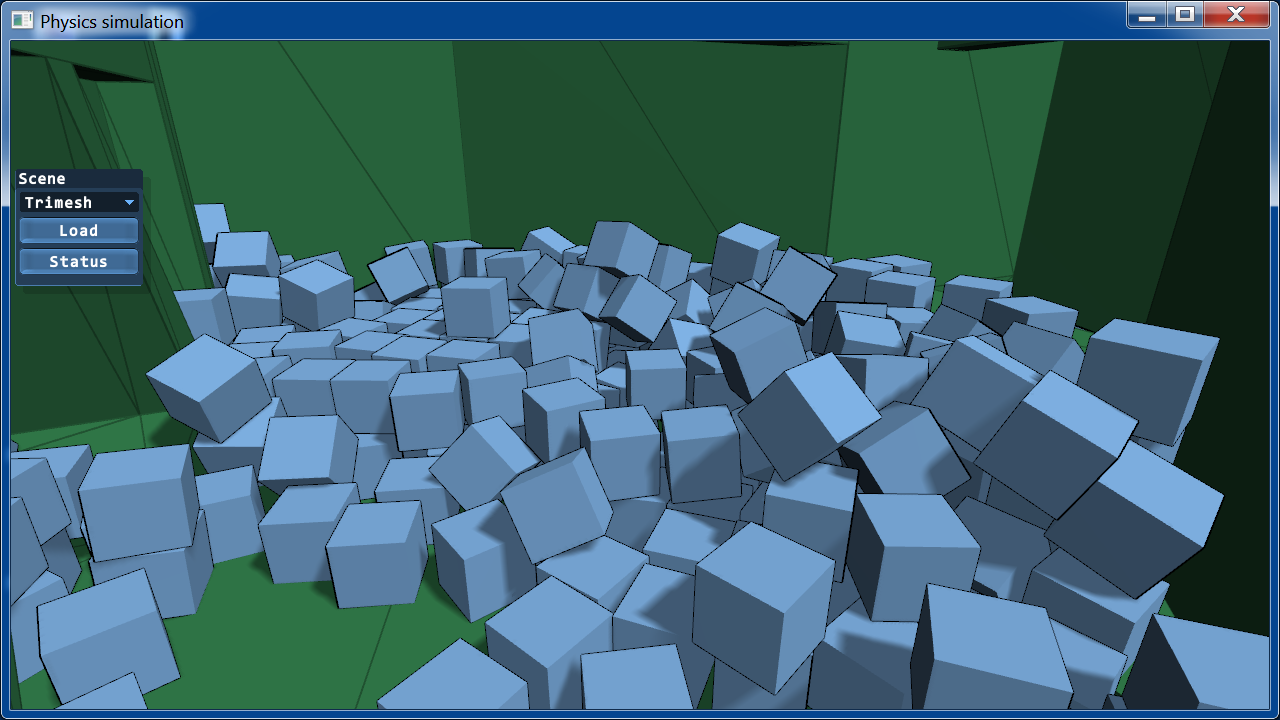
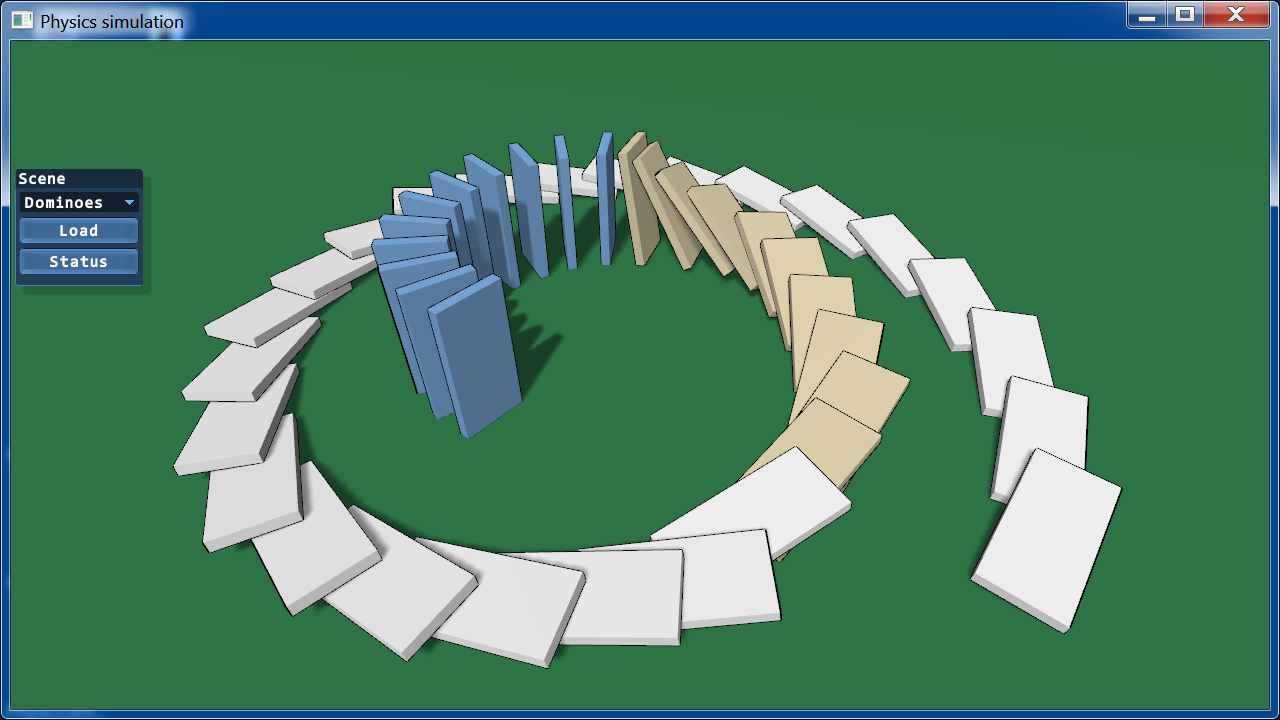
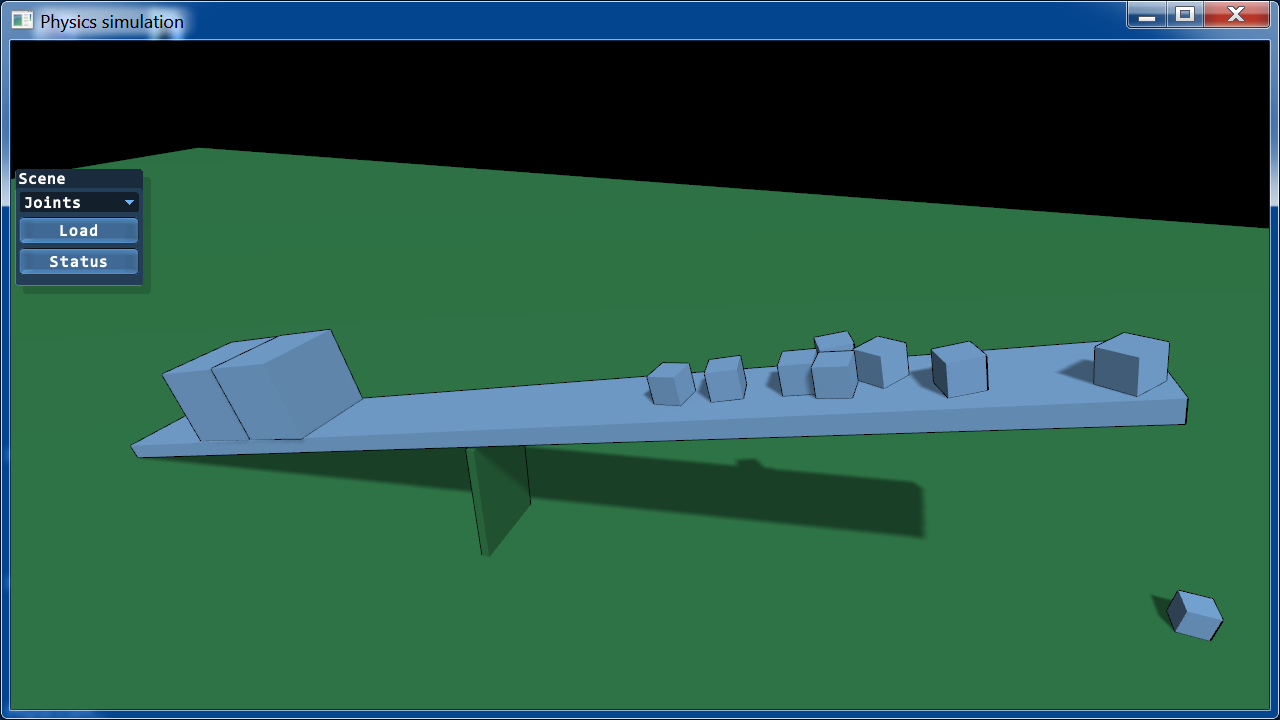
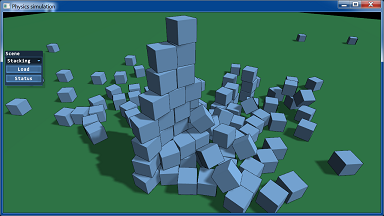
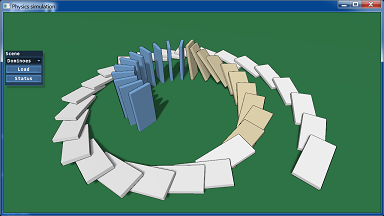
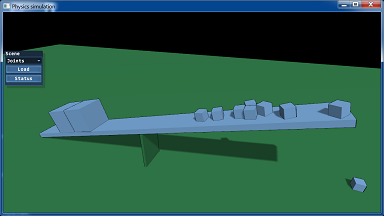
This is a demo of a realtime physics engine I wrote. It was written in C++ with performance-critical parts relying on SIMD or CUDA where appropriate. The engine supports rigid body dynamics with arbiters for stable collision handling (including stable stacking) with its own collision detection system that supports arbitrary convex polyhedra, swept controllers and static triangle meshes. Scenes are internally represented as a set of collision islands within a bounding volume hierarchy. There's also a solver for handling constraints, which are used to model joints, and a GPU-based fluid dynamics solver for fluid volumes. I'll probably write more about this project at some point in the future.
Screenshots