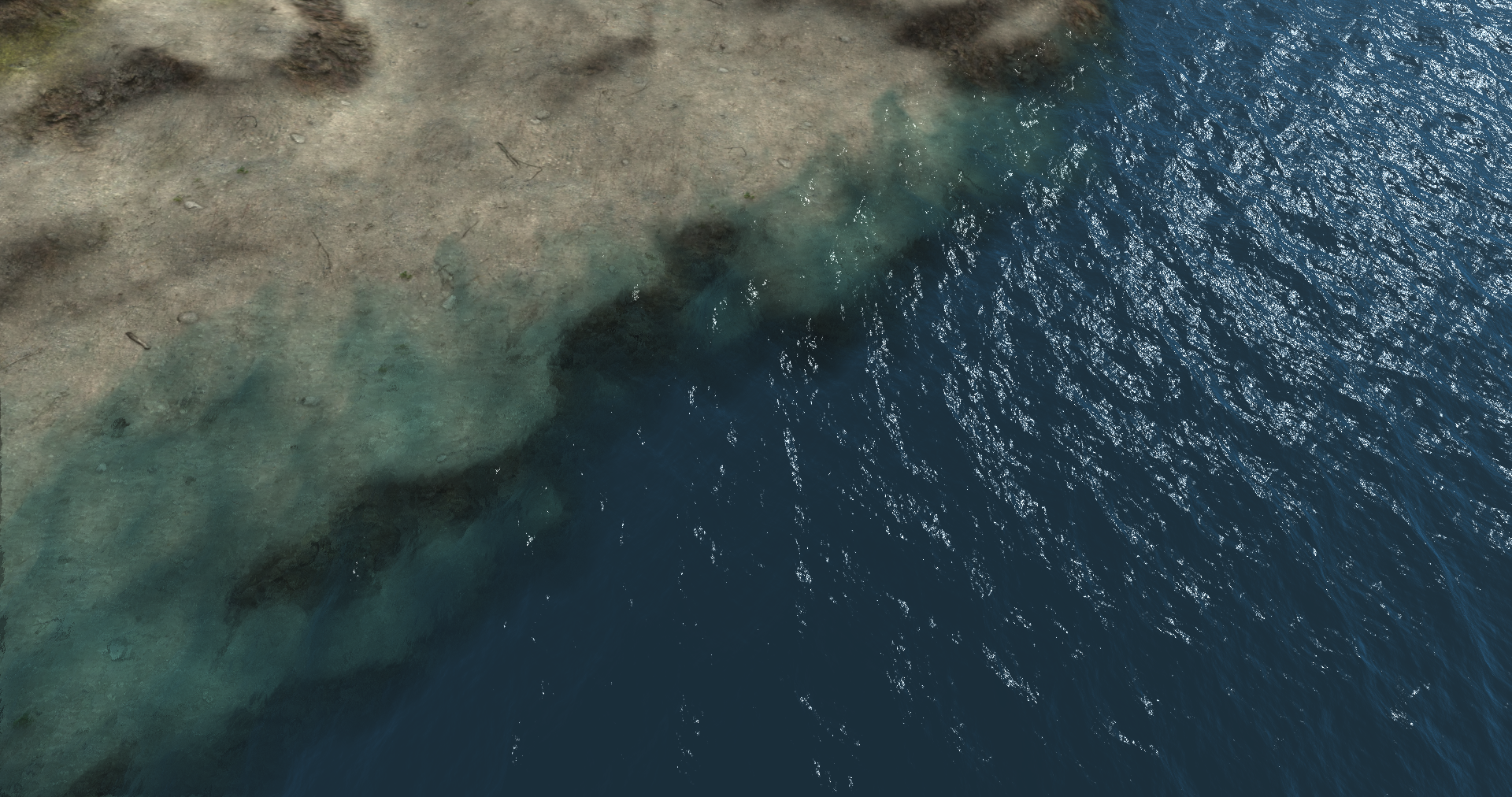
Terrain Rendering
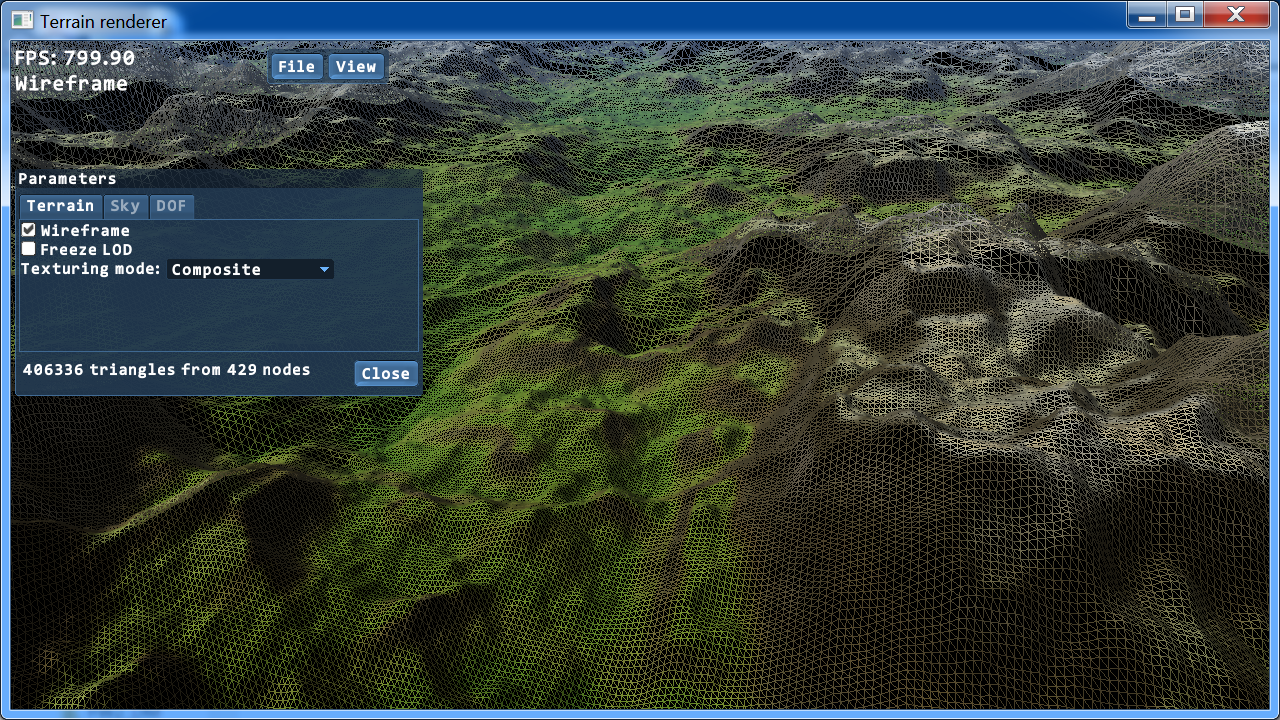
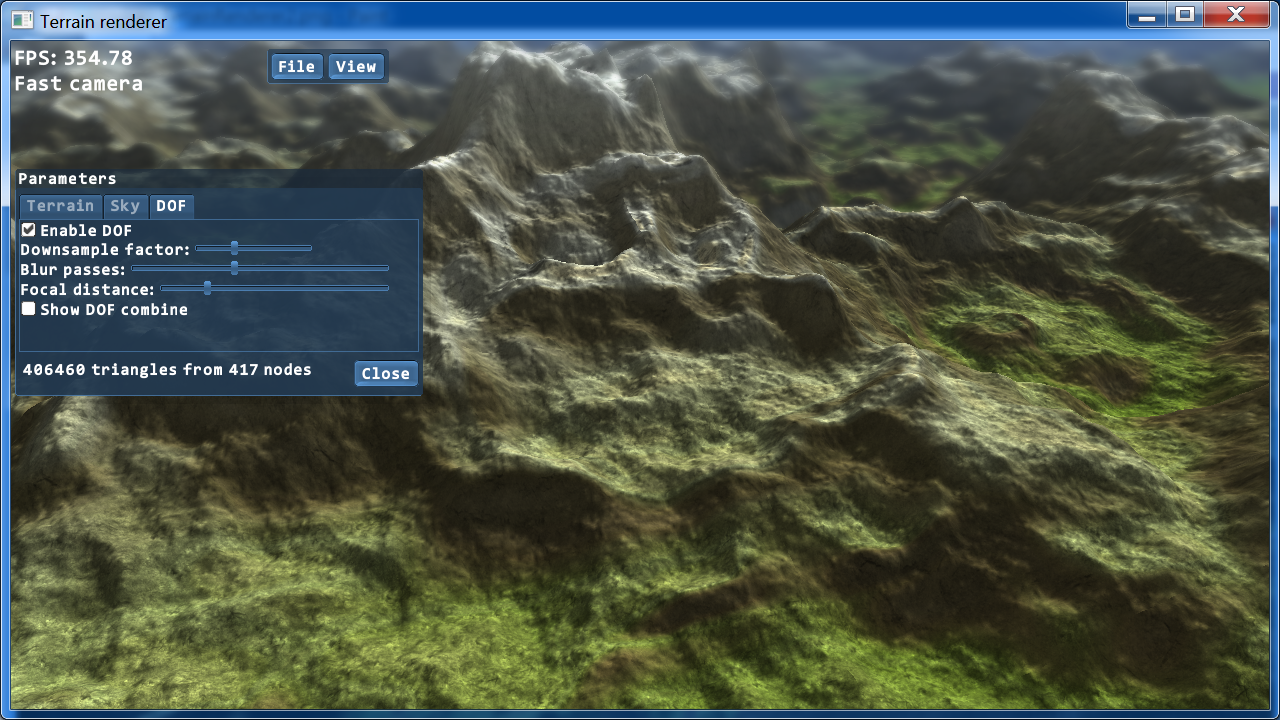
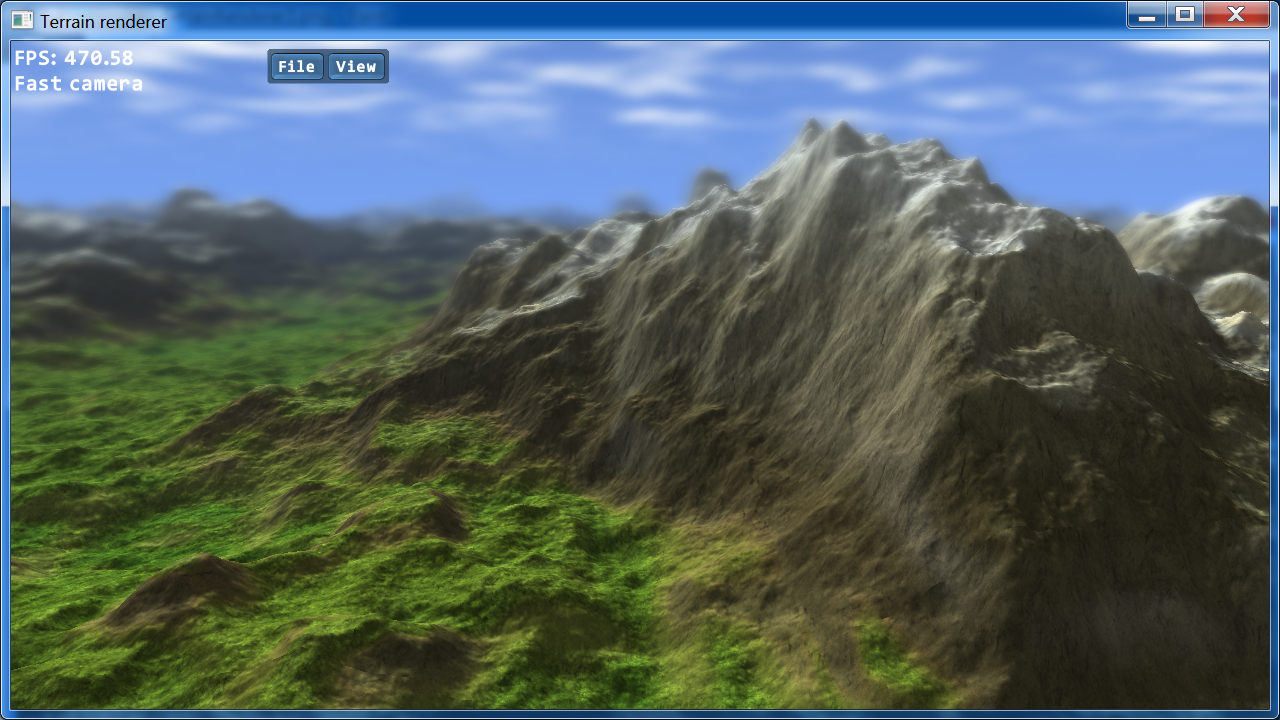
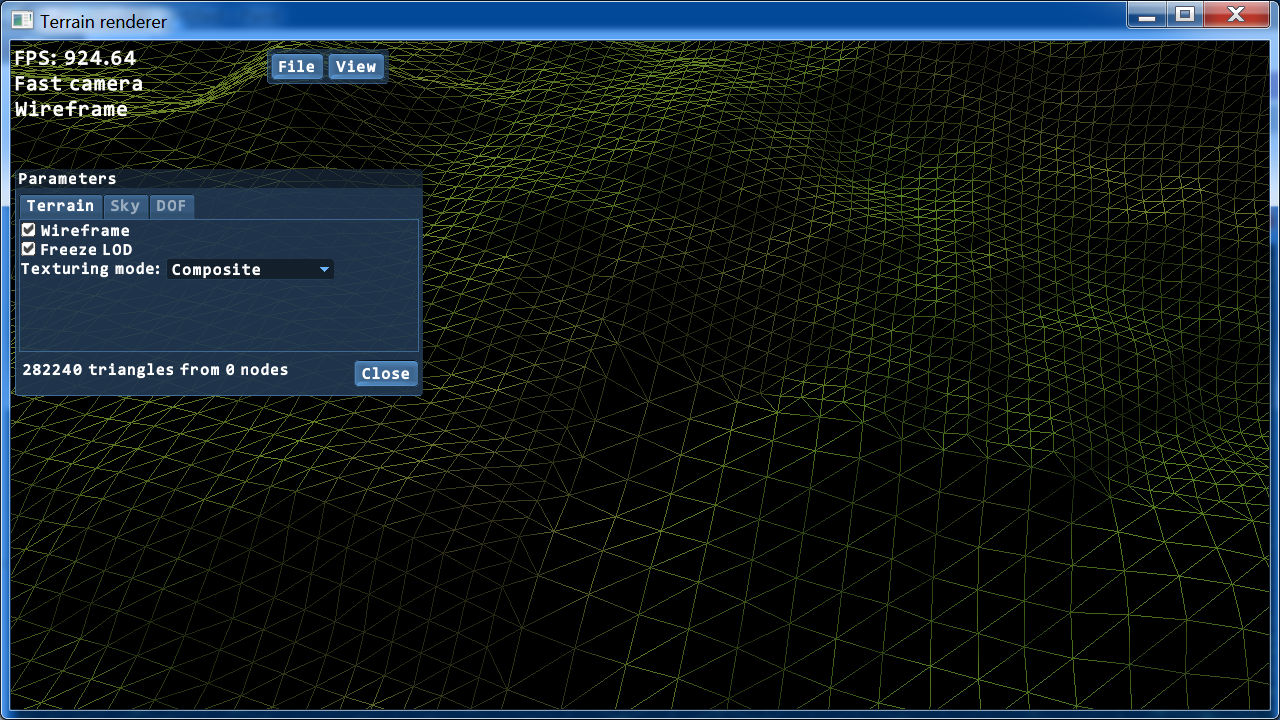
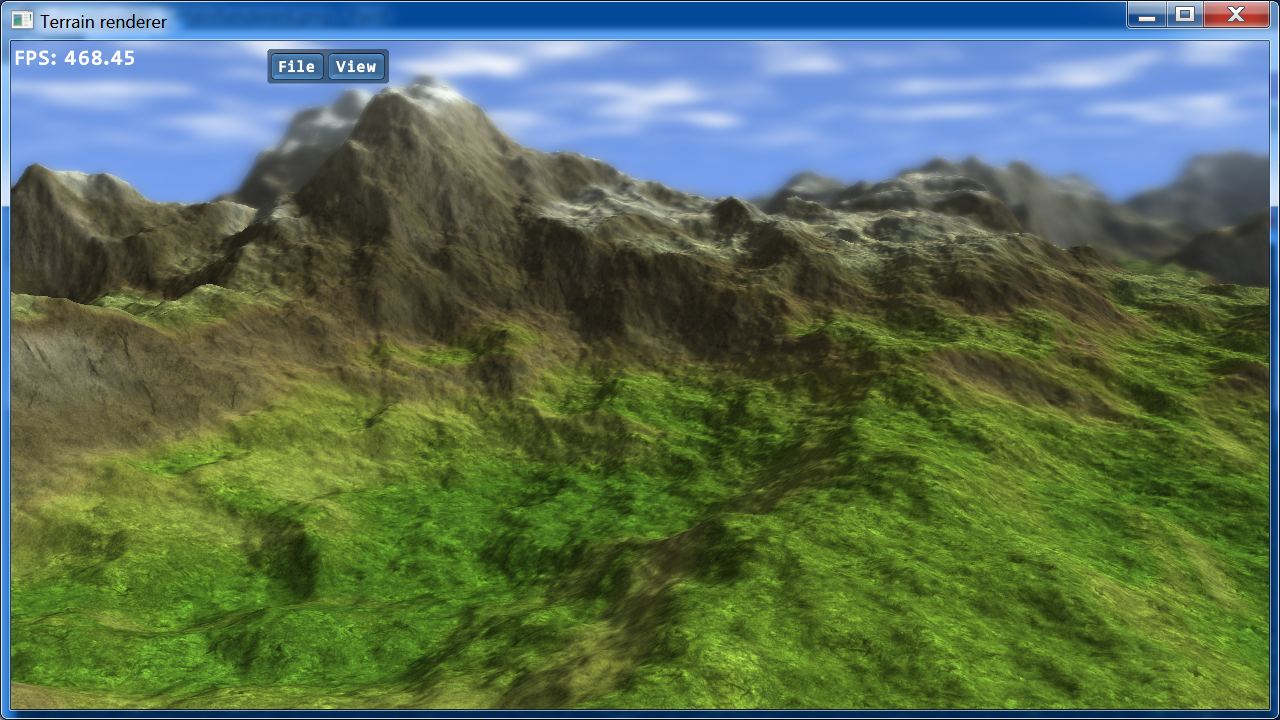
Here are some images of a large-scale terrain rendering system that I wrote as a graphics demo. The heightmap used is generated on the GPU with noise and erosion, with one pixel per vertex. Lightmaps are also generated on the GPU, and evaluate the terrain to a greater degree of accuracy than the heightmaps need to. LOD management is done with geomipmapping and stitching tiles to their neighbours. This demo also features dynamic texture compositing, depth of field and clouds generated with layered noise.
Screenshots
Click to enlarge. New screenshots below.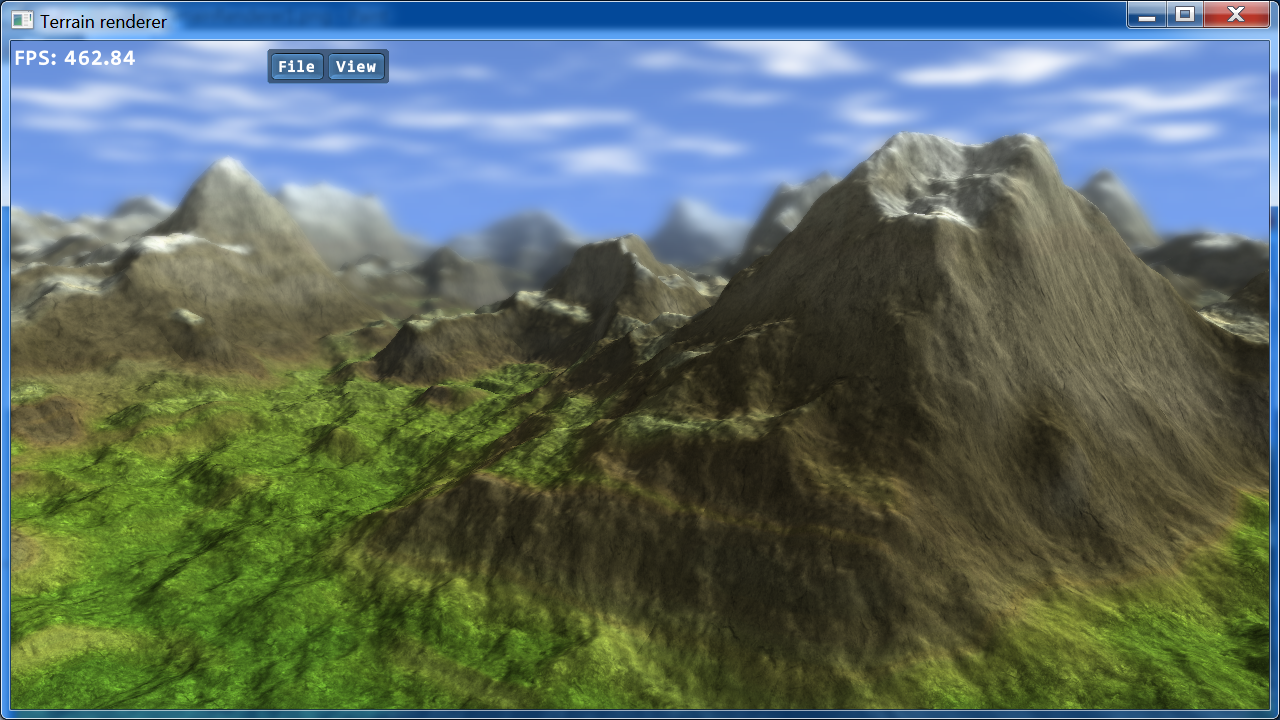

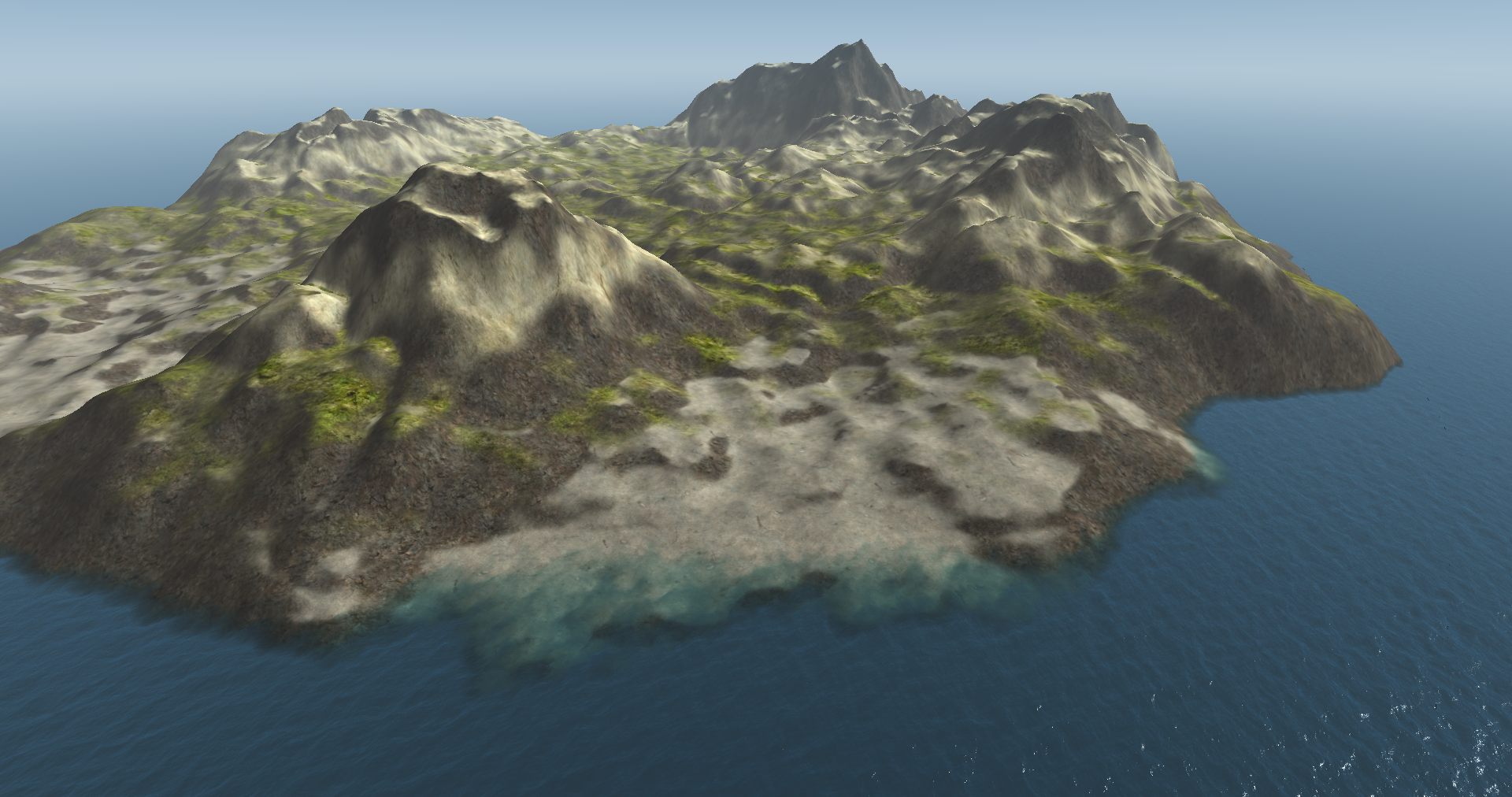
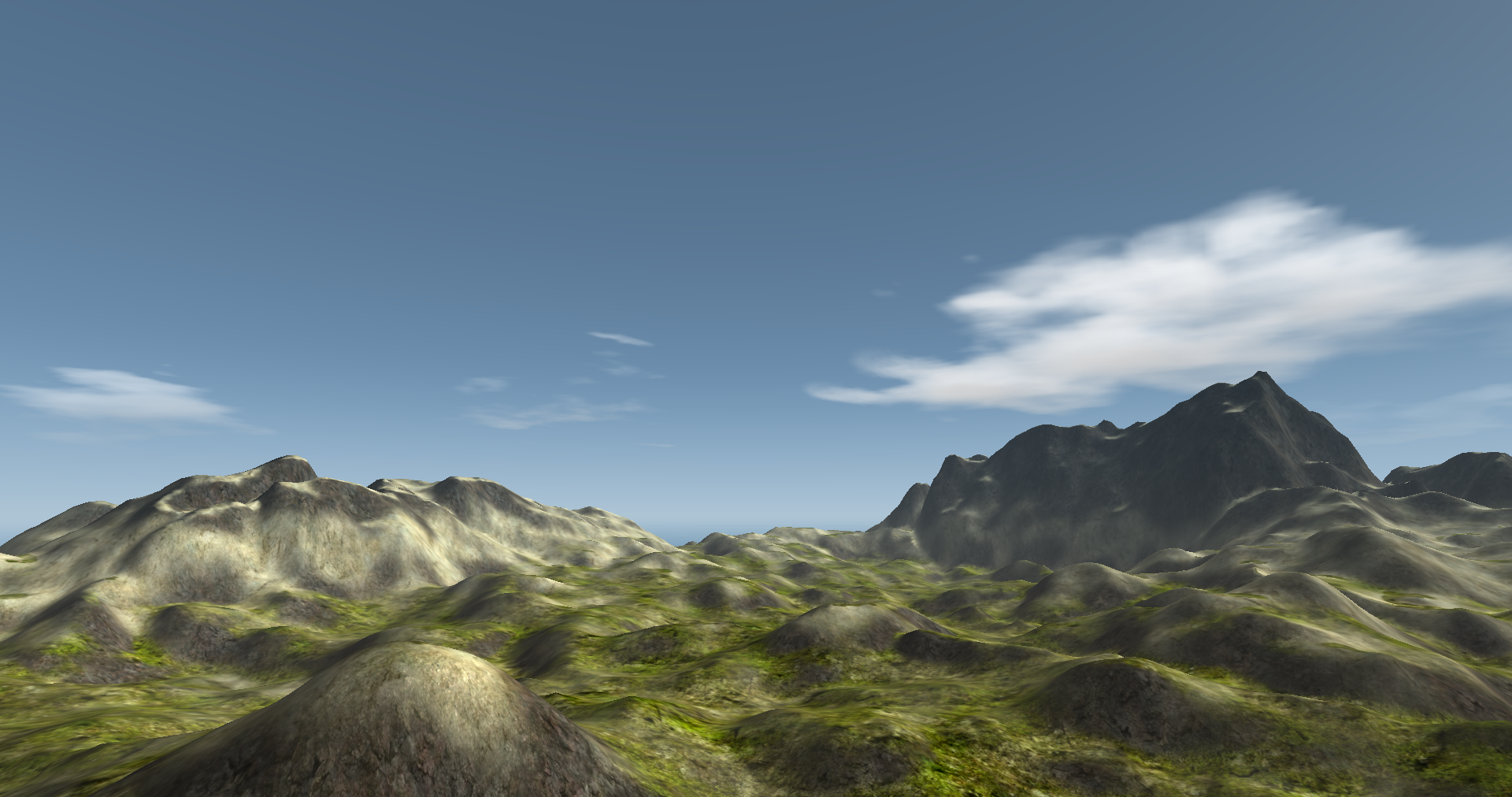
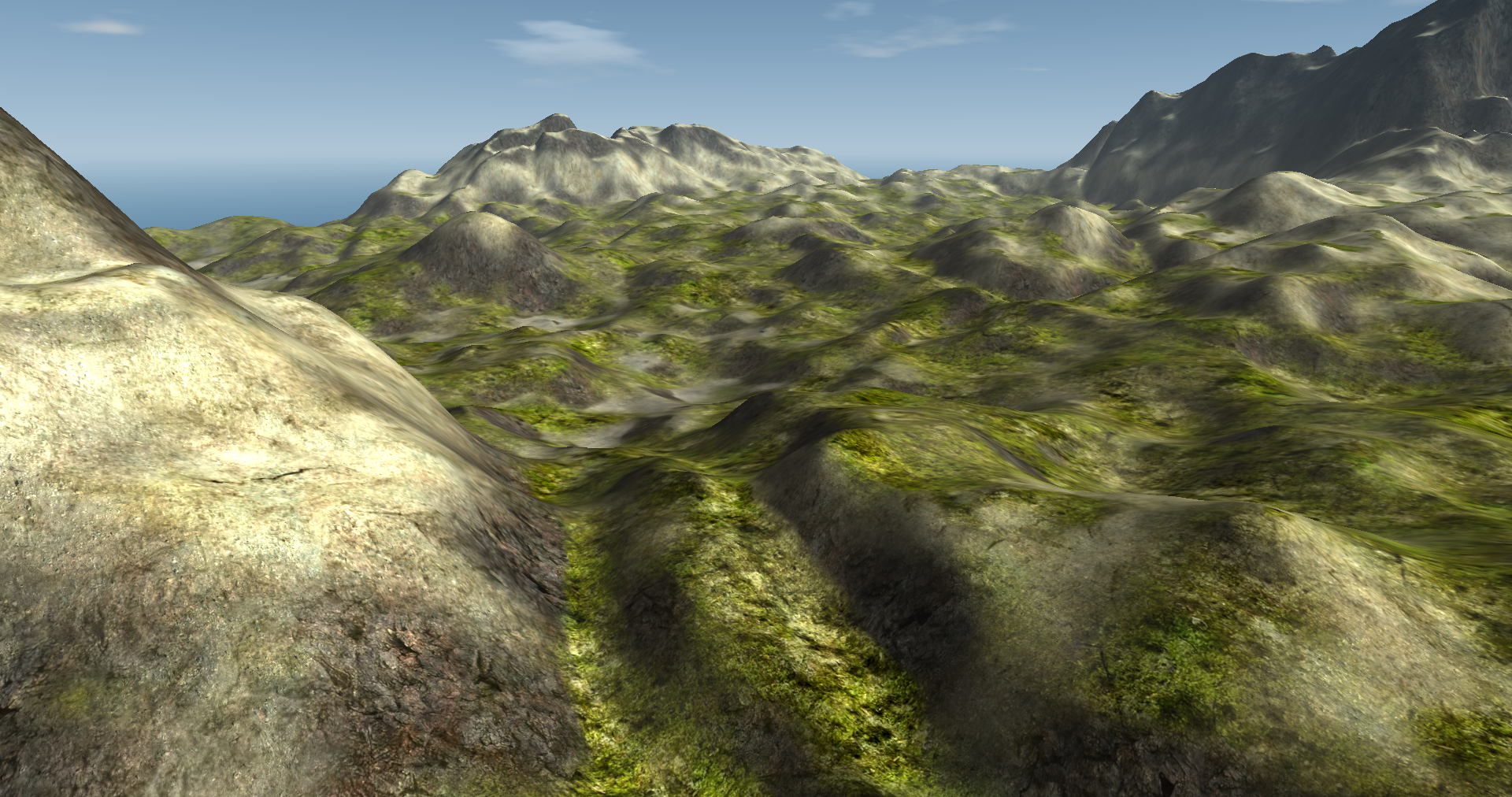
Here are some screenshots from a latter project. It is a procedurally generated island with procedural volumetric clouds, dynamic level of detail through geomipmapping, a fluid volume renderer, and a GPU-based Fourier transform for an ocean heightfield simulated with a wave model based on the Philips statistical spectrum.
Screenshots
Click to enlarge.